Одним из важных направлений снижения энергопотребления является внедрение энергосберегающего оборудования, к которому в первую очередь относится частотно-регулируемый электропривод (ЧРП) – асинхронный электродвигатель, управляемый от преобразователя частоты.
Одним из важных направлений снижения энергопотребления является внедрение энергосберегающего оборудования, к которому в первую очередь относится частотно-регулируемый электропривод (ЧРП) – асинхронный электродвигатель, управляемый от преобразователя частоты.
В данной статье отражены рекомендации, как выбрать преобразователь частоты, как подобрать частотный преобразователь, чтобы он отвечал всем Вашим потребностям, каков экономический эффект от внедрения частотного преобразователя.
Для начала ответим на вопрос, Что такое преобразователь частоты и Зачем нужен частотный преобразователь?
Успешное внедрение частотных преобразователей для решения различных технологических задач, объясняется в первую очередь обширным распространением асинхронных электродвигателей (до 90% рынка) отличающихся простотой конструкции, высокой надежностью, дешевизной, легкостью подключения и т.д.
Но данным электродвигателям также присущи и некоторые недостатки, снижающие их область применения или делающих их менее эффективными. К ним можно отнести – невозможность плавного регулирования частоты вращения ротора и как следствие неэкономичное применение при определенных задачах, существенные пусковые токи и т.д.
Для устранения вышеописанных недостатков асинхронных электродвигателей и были разработаны частотно регулируемые электропривода.
Частотно-регулируемый привод (частотно-управляемый привод) — система управления частотой вращения ротора асинхронного (или синхронного) электродвигателя. Состоит собственно из электродвигателя и преобразователя частоты (ПЧ).
Частотно-регулируемый электропривод (ЧРП) — это электронное устройство обеспечивающие питание и защиту электродвигателя, и состоящее из выпрямителя (моста постоянного тока), инвертора (преобразователя) и схемы управления.
В преобразователях частоты используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды.
Мощные выходные транзисторы обеспечивают необходимый ток для питания электродвигателя. Для исключения перегрузки преобразователя при большой длине фидера между преобразователем и фидером ставят дроссели, а для уменьшения электромагнитных помех — EMC-фильтр.
Выбор преобразователя частоты
При выборе модели преобразователя частоты следует исходить из конкретной задачи, которую должен решать электропривод, типа и мощности подключаемого электродвигателя, точности и диапазона регулирования скорости и т.д. Так же можно учитывать конструктивные особенности преобразователя, такие как размеры, необходимая степень защиты (IP), возможность выноса пульта управления и др.
Типы преобразователей частоты
ПЧ классифицируются по следующим критериям:
- Количество фаз на входе – возможны однофазные и трехфазные варианты
- Исполнение по номинальному напряжению – существуют общепромышленные ПЧ для сетей до 500В, а также высоковольтные на U до 6000В
- Исполнение по степени защиты IP
- Типу управления – векторное или скалярное
- Области применения – существуют общепромышленные, лифтовые, для нососно-вентиляторной нагрузки
Мощность преобразователя частоты. Мощность электропривода является, пожалуй, одним из основных его параметров. В зависимости от номинальной мощности двигателя выбирается частотный преобразователь. Рекомендуется выбирать по максимальному значению тока потребляемого двигателем от частотного преобразователя с учетом перегрузочной способности ПЧ. Если требуется большой пусковой момент или короткое время разгона/замедления, выбирается преобразователь на ступень выше стандартного.
При выборе преобразователя для работы со специальными двигателями (двигатели с тормозами, погружные двигатели, с втяжным ротором, синхронные двигатели, высокоскоростные и т.д.) следует руководствоваться, прежде всего, номинальным током преобразователя, который должен быть больше номинального тока двигателя, а также особенностями настройки параметров преобразователя.
Диапазон регулирования. Если скорость не будет падать ниже 20% от номинальной, то подойдет практически любой ПЧ, но если нужно снижать скорость и далее, обеспечивая при этом номинальный момент на валу, нужно убедиться в способности частотного преобразователя обеспечить работу электродвигателя на частотах, близких к нулю. Кроме того, с диапазоном регулирования скорости связан еще один вопрос, который требует решения, – охлаждение электродвигателя. Обычно асинхронный двигатель (с самовентиляцией) охлаждается вентилятором, закрепленным на его валу, поэтому при снижении скорости эффективность охлаждения резко падает. Некоторые ПЧ снабжены функцией контроля теплового режима с помощью обратной связи через датчик температуры установленного на самом электродвигателе. Существуют и другие варианты решения данного вопроса, но уже без использования ПЧ
Способы управления заданием. Некоторые механизмы должны управляться от задания, плавно изменяя обороты электродвигателя с вращением ручки потенциометра, а в некоторых случаях требуется работа на фиксированных скоростях. Причем, и в том и другом случае может быть возможным управление, как с самой панели ПЧ, так и по аналоговым входам с помощью кнопок, переключателей и потенциометров. При реализации последнего варианта необходимо убедиться в достаточном количестве требуемых входов. В случае использования внешнего управляющего устройства (контроллера, логического реле и т.д.), необходимо убедиться в согласовании по техническим параметрам. Обычно это токовые или вольтовый сигналы с диапазонами 0…20мА, 4…20мА и 0…10В соответственно. Если управление частотного преобразователя происходит по сети, то необходимо наличие соответствующих интерфейса с протоколом передачи данных. Управление двигателем может проходить автоматически, для этого необходимо наличие ПИД-регулятора и возможность организовать обратную связь от датчика контролируемого параметра.
Преимущества применения частотного преобразователя:
- Высокая точность регулирования частоты вращения электродвигателя
- Экономия электроэнергии в случае переменной нагрузки (то есть работы электродвигателя с неполной нагрузкой).
- Полная защита двигателя – от перегрузки, перегрева, коротких замыканий, проблем с питанием (слипания, чередования, пропадания фаз).
- Равный максимальному пусковой момент.
- Возможность удалённой диагностики ПЧ и двигателя по промышленной сети.
- Повышение ресурса, как самого электродвигателя, так и оборудования присоединенного к нему вследствие плавного разгона и торможения ротора (нет рывков, при насосном применении отсутствуют гидравлические удары в трубопроводах)
- Уменьшение гидравлического сопротивления трубопровода из-за отсутствия регулирующего клапана
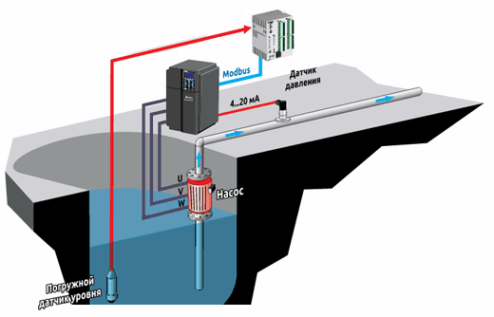
- ПЧ как правило содержит в себе ПИД-регулятор и может подключаться напрямую к датчику регулируемой величины (например, давления).
- Отсутствие пусковых токов
- Управляемое торможение и автоматический перезапуск при пропадании сетевого напряжения
- Подхват вращающегося электродвигателя
- Стабилизация скорости вращения при изменении нагрузки
- Дополнительная экономия электроэнергии от оптимизации возбуждения эл. двигателя
Недостатки применения преобразователей частоты
- Большинство моделей ПЧ являются источником помех
- Сравнительно высокая стоимость ПЧ
Если после прочтения данной статьи, у Вас остались вопросы по выбору частотного преобразователя, смело звоните в электротехническую компанию «Регион-Автоматика»!
Наши квалифицированные специалисты с удовольствием ответят на все вопросы и помогут подобрать преобразователь частоты.
Регион-Автоматика осуществляет поставки частотных преобразователей отечественных и зарубежных производителей.
Необходимо отметить, что Регион-Автоматика является официальным представителем компании «Веспер автоматика» по поставкам частотных преобразователей и другого электрооборудования в Приволжском Федеральном округе.
Кроме того, компания Регион-Автоматика осуществляет модернизацию электрооборудования путем перевода его схем управления с релейно-контактных на схемы с использованием программируемых преобразователей частоты, производит электрощитовое оборудование, станции управления насосами, двигателями с частотными преобразователями.
Выбор частотного преобразователя
Частотный преобразователь (регулируемый электропривод) обеспечивает две его основные и взаимосвязанные функции: управление технологическим процессом рабочей установки в соответствии с предъявляемыми к нему требованиями и электромеханическое преобразование энергии с максимальной ее эффективностью. Реализация этих функций требует особого подхода к выбору и эксплуатации регулируемого электропривода по сравнению с нерегулируемым. Теоретические аспекты такого подхода хорошо известны специалистам в области автоматизированного электропривода (АЭП), Однако, за последние годы произошло заметное сокращение числа специализированных проектных организаций и отток из них наиболее квалифицированных специалистов в области электропривода. Исчезла согласованность проектных и наладочных организаций, их разобщенность стала приводить к повторным ошибкам, а опыт ввода в эксплуатацию электроприводов стал практически (по конъюнктурным соображениям) ограничен для других специалистов.
Обоснование мощности н типа электрических двигателей и частотных преобразователей.
Регулирование технологических координат с высокой статической и динамической точностью требует от электропривода дополнительного запаса по его динамической мощности. Последняя должна выбираться с учетом его реальных нагрузочных диаграмм, включая и динамические составляющие моментов, связанные с изменением приведенного к валу электродвигателя момента инерции. При модернизации электропривода, связанной с заменой одного типа привода на другой, следует учитывать и разницу в перегрузочных способностях по току, моменту и моментах инерции заменяемых электродвигателей. Наиболее актуальны эти замечания для приводов, работающих в повторно-кратковременных режимах работы и на валу которых по технологии рабочей установки имеют место скачкообразные изменения нагрузок.
Распространенной ошибкой является выбор мощности частотного преобразователя питающего электродвигатель по реальной эксплуатационной мощности этого же двигателя в разомкнутой системе управления. При этом из-за ограничения максимально допустимого тока преобразователя возникает проблема обеспечения требуемых динамических показателей привода при введении обратных связей по регулируемым координатам.
Выбор частотных преобразователей на технологическую мощность привода, заметно меньшую номинальной установленной мощности электродвигателя, усугубляет и проблему автоматической идентификации значений его параметров и параметров регуляторов системы управления электроприводом с помощью встроенного в преобразователи их программного обеспечения. При несовпадении предварительно установленных граничных значений параметров двигателя близкого по мощности преобразователю его программное обеспечение либо указывает на невозможность идентификации параметров электродвигателя и блокирует работу преобразователя совместно с двигателем, либо вносит заметные погрешности в свою математическую модель двигателя, на основе которой вычисляются режимы работы и ограничения переменных электропривода. В итоге динамические показатели и эксплуатационная надежность электропривода снижаются.
При выборе частотных преобразователей, работающих в регулируемом электроприводе с высоко динамичными и повторно-кратковременными режимами, не редко игнорируется необходимость обеспечения рекуперации энергии со стороны электродвигателя в питающую сеть, либо на активную нагрузку. Такие преобразователи должны иметь либо двухсторонний обмен энергией между двигателем и питающей преобразователь сетью (ПЧ с непосредственной связью, на основе автономных инверторов тока, с блоком рекуперации на входе инвертора), либо иметь дополнительный резистор для сброса на него рекуперируемой энергии. Создание многодвигательного привода с единой шиной постоянного тока для питания инверторов ПЧ и установкой общего инвертора постоянного тока на неполную суммарную мощность привода способствует решению подобной проблемы. Понятно, что стоимость таких преобразователей возрастает, но технология работы установок и особенно требования их экстренного останова при аварийных режимах или опасности жизнедеятельности обслуживающего персонала вынуждает идти на дополнительные затраты.
Регулирование скорости привода переменного тока отражается и на ухудшении условий охлаждения электродвигателей с самовентиляцией при уменьшении их скорости. Российская электротехническая промышленность, к сожалению, отстает от производства специальных машин переменного тока при их питании от управляемых ПЧ. В итоге это заставляет либо увеличивать установленную мощность двигателей, либо решать в экстренных ситуациях проблему их дополнительного охлаждения.
Одна из особенностей питающих сетей крупных металлургических комбинатов России связана с тем, что их номинальное напряжение достигает 10 кВ. Это создает заметные трудности при замене нерегулируемого электропривода переменного тока на регулируемый, поскольку в отечественной промышленности отсутствует выпуск ПЧ с выходным напряжением до 10 кВ. Актуальность их создания весьма велика.
Для мощных технологических установок, где окружающая среда отличается повышенной влажностью или наличием токопроводящих Частиц, наметилась тенденция заказа со стороны эксплуатационного персонала низковольтного исполнения электропривода. Подобное решение способствует заметному снижению эксплуатационных затрат на его обслуживание при увеличении надежности и безопасности электрооборудования.
Согласование преобразователей частоты с питающей их сетью и электродвигателем.
Возможность резких колебаний и искажений напряжения и тока питающей преобразователи сети из-за коммутационных режимов (включении и отключении питающего преобразователь трансформатора, коммутации вентилей и т.п.) заставляет принимать специальные защитные меры по ограничению их влияния на работу преобразователя и системы его управления. К числу подобных мер относятся установка на входе преобразователя силовых токоограничивающих реакторов, защитных RC-цепей или варисторов. Актуальность обоснования и выбора их параметров сохраняется и до сих пор.
Особенно это проявляется при замене отечественных преобразователей на преобразователи иностранных фирм, когда сохраняются питающая сеть со всеми реальными для нее отклонениями напряжения и основные силовые элементы отечественного производства (трансформаторы, коммутационная аппаратура, электродвигатели) с параметрами (индуктивностью, емкостью, временем коммутации и т.п.), отличающимися от зарубежных.
Наличие промежуточного повышающего трансформатора на выходе ПЧ для питания электродвигателя с более высоким напряжением на статоре, чем выходное напряжение преобразователя, создает ряд проблем, связанных с дополнительным нагревом этого трансформатора из-за высокочастотных составляющих выходного тока преобразователя, с первоначальным пуском двигателя и выбором начальной частоты и выходного напряжения преобразователя. Они усиливаются для технологических установок с активным моментом сил сопротивления и требующих по технологии применения структур векторного управления электроприводом.
Внедрение ПЧ с широтно-импульсной модуляцией его выходного напряжения сопровождается усилением требований к состоянию изоляции силовых цепей элементов электропривода и возможности использования старых кабелей связи при реконструкции привода. Высокочастотные составляющие выходного напряжения преобразователей вынуждают устанавливать на их выходе либо дополнительные фильтры, либо ограничивать длину кабельных линий между преобразователем и двигателем для ограничения перенапряжений на силовых полупроводниковых ключах преобразователя. Заметно возросла и актуальность контроля изоляции силовых цепей электропривода с помощью специализированных устройств.
Для привода ряда механизмов (насосов, компрессоров, дутьевых вентиляторов и т.п.) по технологическим и экономическим соображениям часто закладываются требования управляемого пуска асинхронного двигателя до его номинальной скорости с последующим подключением двигателя на питающую сеть, или обратно от сети к ПЧ для управляемого режима торможения. Такие переключения могут сопровождаться заметными и, часто недопустимыми, изменениями тока в силовой цепи питания и скорости двигателя. Особенно это сказывается при больших нагрузках и малых моментах инерции привода, Для подобных режимов работы электропривода используется способ переключения с “перекрытием”, когда асинхронный двигатель кратковременно подключается и к сети и к преобразователю частоты одновременно. При этом для достижения равенства частоты, амплитуды и синфазности выходного напряжения преобразователя с напряжением питающей сети в системе управления ПЧ должен предусматриваться специальный блок синхронизации, а для ограничения уравнительных токов между ПЧ и сетью устанавливаться разделительный дроссель.
Для регулируемого электропривода подъемно-транспортных механизмов (кранов, слитковозов и т.п.) могут возникать проблемы, связанные с кратковременными прерываниями тока в силовых цепях подключения статорных обмоток асинхронного электродвигателя к выходу ПЧ посредством контактных проводов (троллеев) через скользящие токосъемники, При работе ПЧ со скалярной системой управления координатами электродвигателя подобное прерывание тока лишь в одной его фазе не приводит к аварийным режимам и останову привода. При длительном прерывании тока в одной фазе электродвигателя из-за асимметрии его напряжения питания увеличиваются потери в двигателе и, при нагрузке на его валу, уменьшается частота вращения. В итоге ПЧ будет отключен со стороны защиты двигателя по превышению его температуры. При работе ПЧ с векторной системой управления координатами электродвигателя кратковременное прерывание тока в одной из фаз вызывает аварийное отключение привода и его останов. Кратковременное двухфазное прерывание питания электродвигателя в скользящих токосъемниках приводит, как правило, к отключению преобразователя по его максимально-допустимому току при последующем восстановлении питания двигателя, Для подобных режимов необходимо в программное обеспечение системы управления преобразователем включать либо возможность его автоматического повторного включения или “самоподхвата”, при котором используется кинетическая энергия вращения ротора двигателя.
Наладка частотного преобразователя.
Развитие микропроцессорных систем управления электропривода позволяет получать весьма качественные его показатели, однако их техническая реализация требует и более глубокой информации о реальных параметрах элементов электропривода. К сожалению, в отечественных каталогах и паспортных данных на электрооборудование все реже можно найти данные по активным и реактивным сопротивлениям электрических обмоток двигателей, их тепловых постоянных времени, моментов инерции и т. п., т. е. по тем параметрам, которые должны вводиться в программное обеспечение системы управления электропривода. Отсутствие численных значений ряда параметров силовой части электропривода, которые должны вводиться в математическую модель электродвигателя, заметно ограничивает качество настройки и надежность работы электропривода. Поэтому во многих преобразователях предусмотрен режим идентификации этих параметров и автоматической настройки параметров регуляторов системы управления вводимого в эксплуатацию электропривода. Следует отметить, что настройка параметров регуляторов носит, как правило, “ориентировочный” характер, обеспечивая лишь устойчивость замкнутой системы регулирования выходных координат. Затем, при необходимости увеличения динамических показателей электропривода, параметры регуляторов должны корректироваться более качественно уже наладочным персоналом.
Увеличению точности и стабильности систем управления электропривода; их эксплуатационной надежности и снижению затрат на обслуживание способствуют идеология анализа и синтеза цифровых систем по подобию аналоговых систем управления; возможность реализации на их основе не только структур подчиненного регулирования координат электропривода, но и иных технологически обусловленных структур, например с переключающимися обратными связями, с системами по принципу фаззи-логики, нейронными системами и т. п.
Выбор структуры управления электропривода во многом определяет его конечные показатели регулирования. Для частотно-регулируемого асинхронного электропривода наиболее распространен скалярный принцип управления его координатами. Ему свойственна техническая простота измерения и регулирования переменных электродвигателя, а также возможность построения как замкнутых, так и разомкнутых систем управления его скоростью. Основной недостатком скалярного управления в трудности реализации желаемых законом регулирования момента и высоких динамических показателей регулирования координат электропривода, Поэтому для приводов, где по технологии требуется максимальное быстродействие при регулировании его координат и управление моментом электропривода, применяется векторное управление его координатами.
Наличие в программном обеспечении преобразователей стандартных функциональных модулей, позволяющих при наладке электропривода оперативно менять структуру и алгоритмы его управления в соответствии с возможными коррекциями технологических режимов его работы, способствует увеличению качества их настройки. На основе функциональных модулей могут быть реализованы и системы логического управления электроприводом, блокировок, защит и диагностирования работоспособности привода. При этом процедура построения и программирования функциональных модулей, представленных в цифровой форме преобразования сигналов, должна быть близка к широко понятной эксплуатационным персоналом аналоговой форме их реализации. Подобное решение имеет место для многих зарубежных преобразователей, где функциональные блоки объединяются между собой аналоговыми и логическими “соединителями”, кодируемыми численными номерами.
Обеспечение электромагнитной совместимости частотного преобразователя.
Уменьшение мощности управления при резком увеличении динамических свойств элементов, роста мощности и числа дискретных преобразователей заметно обострили проблему электромагнитной совместимости (ЭМС) элементов АЭП и АСУТП. Проблема усугубляется и частым игнорированием ее специалистами, непосредственно отвечающими за функционирование АЭП и АСУТП — проектантами, конструкторами, службами электромонтажа, наладки и эксплуатации.
Распространенной ошибкой с позиций обеспечения ЭМС элементов АЭП в последнее время стало применение неэкранированных силовых кабелей между ПЧ и электродвигателем. Способствует этому и отсутствие выпуска в отечественной промышленности силовых кабелей, имеющих экранированную оболочку с внешним изоляционным слоем и специально предназначенных для работы с мощными ПЧ. В итоге приходиться пользоваться зарубежной кабельной продукцией с весьма высокими на нее ценами.
Обеспечения работоспособности электропривода связано и с необходимостью диагностирования его технического состояния в условиях промышленной эксплуатации АЭП. Кроме общепринятых и программно реализованных в устройствах управления ПЧ систем диагностирования собственно электроприводов, для контроля внешних устройств управления электроприводом и технологических режимов его работы целесообразно сопровождать эти системы видеотерминальными устройствами наблюдения и записи контролируемых координат со встроенными в них дополнительными программами диагностирования. Так, для управления технологическими режимами и диагностирования технического состояния асинхронного частотно-регулируемого электропривода резиносмесителя MX-2 специалистами ОАО «Электропривод» и кафедры электропривода МЭИ была разработана и внедрена видеотерминальная станция, работающая в режиме реального времени и обеспечивающая регистрацию, визуализацию и архивацию основных координат электропривода, в том числе и в аварийных ситуациях.
Время выполнения запроса: 0,00246000289917 секунд.
Предназначение частотника для трехфазного электродвигателя, разбираемся вместе
2 commentsПрименение Апрель 26, 2019
Создание трёхфазного асинхронного электродвигателя пришлось на конец XIX века. С тех пор, никакие промышленные работы не являются возможными без его использования. Наиболее значимый момент в рабочем процессе — плавный пуск и торможение двигателя. Это требование в полной мере выполняется при помощи частотного преобразователя.
Существует несколько вариантов названий частотника для трёхфазного электродвигателя. В том числе, он может называться:
- Инвертором;
- Преобразователем частоты переменного тока;
- Частотным преобразователем;
- Частотно регулируемым приводом.
С помощью инвертора осуществляется регуляция вращательной скорости асинхронного электродвигателя, предназначенного для преобразования электрической энергии в механическую. Осуществляемое при этом движение можно трансформировать в движение другого типа.
Специально разработанная схема частотного преобразователя позволяет доводить КПД двигателя до уровня в 98%.
Наиболее значимо использование преобразователя в конструкции электрического двигателя большой мощности. Частотник позволяет осуществлять изменения пусковых токов и задавать для них требуемую величину.
Принцип работы частотного преобразователя
Использование ручного управления пускового тока чревато излишними энергозатратами и уменьшением срока эксплуатации электрического двигателя. При отсутствии преобразователя также наблюдается превышение номинального значения напряжения в несколько раз. Из-за работы в таком режиме, также наблюдается негативное влияние.
Кроме того, частотный преобразователь обеспечивает плавность управления функционированием двигателя, ориентируясь на балансировку значений напряжения и частоты, и снижает энергопотребление вдвое.
Весь приведённый перечень положительных моментов возможен благодаря принципу двойного преобразования напряжения. Действует он следующим образом:
- Сетевое напряжение регулируется через выпрямление и фильтрование в звене прямого тока.
- Выполнение электронного управления, которое формирует определённую частоту, в соответствии с предварительно обозначенным режимом, и трёхфазное напряжение.
- Происходит продуцирование прямоугольных импульсов с последующей корректировкой амплитуды при помощи обмотки статора.
Как правильно подобрать преобразователь частот
Наиболее значимо при покупке частотника — не жалеть денег. В случае с преобразователем, дешёвый всегда означает малофункциональный, а это делает покупку бесполезной.
Также следует обратить внимание на тип управления преобразователя:
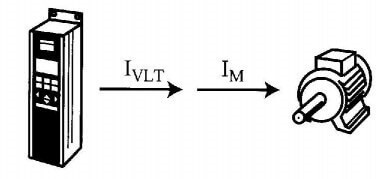
Высокоточная установка величины тока.
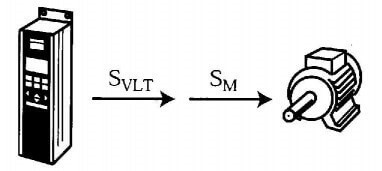
Рабочий режим ограничен заданным выходным соотношением частоты и напряжения. Данный тип управления уместен только для бытовых приборов простейшего типа.
Далее следует обратить внимание на мощность преобразователя частоты. Тут всё просто: чем больше, тем лучше.
Питающая сеть должна обеспечивать достаточно широкий диапазон напряжений. Это снижает риск поломки при резких скачках. Чрезмерно высокое напряжение может спровоцировать взрыв конденсаторов.
Показатели частоты должны удовлетворять производственным потребностям. Их нижний порог определяет широту возможностей для управления приводной скорости. Максимальный частотный диапазон возможен только при векторном управлении.
Число входящих/выходящих управляющих разъёмов должно быть немного больше минимально необходимого. Но это, конечно, отражается на повышении цены и возникновении затруднений при установке устройства.
Наконец, требуется обратить внимание на совпадение характеристик управляющей шины и параметров частотника. Это определяется по соответствию числа разъёмов.
Важно отметить способность переносить перегрузки. Запас мощности преобразователя частоты должен на 15% превосходить мощность двигателя.
Комплектация регулируемого привода
Частотный преобразователь формируется из трёх компонентов:
- Управляемый, либо неуправляемый выпрямитель, отвечающий за формирование напряжения ПТ (постоянного тока), поступающего от питания.
- Фильтр (в виде конденсатора), осуществляющий дополнительное сглаживание напряжения.
- Инвертор, моделирующий напряжение нужной частоты.
Самостоятельное подключение преобразователя
Перед тем, как приступать к подключению устройства следует воспользоваться обесточивающим автоматом, он обеспечит отключение всей системы в случае короткого замыкания на любой из фаз.
Схема актуальна, если требуется управлять однофазным приводом. Уровень мощности преобразователя в схеме при этом составляет до трёх киловатт, а мощность не теряется.
Способ, подходящий для подключения клемм трёхфазных частотников, питаемых промышленными трёхфазными сетями.
На рисунке схема подключения частотника 8400 Vector
Для ограничения пускового тока и снижения пускового момента при запуске электрического двигателя по мощности превосходящего 5 кВт, применяется переключение «звезда-треугольник».
Когда на статор пускается напряжение, то фигурирует подключение устройства по типу «звезда». Как только значение скорости двигателя начинает соответствовать номинальному, поступление питания осуществляется по схеме «треугольник». Но этот приём используется, только когда технические возможности позволяют подключаться по двум схемам.
В объединённой схеме «звезды» и «треугольника» наблюдаются резкие скачки токов. При переходе на второй тип подключения показания по вращательной скорости значительно уменьшаются. Для восстановления прежнего режима работы и частоты оборотов следует осуществить увеличение силы тока.
Наиболее активно применяются частотники в конструкции электрического двигателя с уровнем мощности 0,4 — 7,5 кВт.
Сборка преобразователя частот своими руками
Одновременно с промышленным производством частотных преобразователей, остаётся актуальной сборка подобного устройства своими руками. Особенно этому способствует относительная простота процесса. В результате работы инвертора производится преобразование одной фазы в три.
Применение в бытовых условиях электрических двигателей, имеющих в комплектации подобное устройство, не вызывает никаких дополнительных затруднений. Поэтому можно смело браться за дело.
На рисунке структурная схема частотных преобразователей со звеном постоянного тока.
Схемы частотного преобразователя, используемые при сборке, состоят из выпрямительного блока, фильтрующих элементов (отвечающих за отсечение переменной составляющей тока и конструируемых из IGBT-транзисторов). По стоимости покупка отдельных компонентов преобразователя и выполнение сборки своими руками обходится дешевле, чем приобретение готового устройства.
Применять самосборные частотные преобразователи можно в электродвигателях имеющих мощность 0,1 — 0,75 кВт.
В то же время, современные заводские частотники имеют расширенную функциональность, усовершенствованные алгоритмы и улучшенный контроль безопасности рабочего процесса ввиду того, что при их производстве используются микроконтроллеры.
Сферы применения преобразователей:
- Машиностроение;
- Текстильная промышленность;
- Топливно-энергетические комплексы;
- Скважинные и канализационные насосы;
- Автоматизация управления технологическим процессом.
Стоимость электродвигателей находится в прямой зависимости от того, есть ли в его комплектации преобразователей.
Выбор преобразователя частоты для привода переменного тока. Основные критерии
Асинхронный двигатель с короткозамкнутым ротором – наиболее простой по конструкции, надежный и дешевый тип двигателя для применения в приводах промышленных механизмов и машин. С появлением современных силовых полупроводниковых приборов – IGBT-модулей и GTO-тиристоров, – созданы гибкие и эффективные преобразователи частоты (ПЧ), позволяющие регулировать скорость асинхронных электродвигателей в широком диапазоне с одновременным управлением усилием на валу двигателя.
Правильный выбор преобразователя частоты совместно с двигателем позволяет создать эффективный и долговечный привод для практически любого вида механизмов промышленного или бытового применения.
Большинство производителей ПЧ представляет технические характеристики своих изделий упорядоченно в виде нескольких функционально объединенных разделов:
- Энергетические и выходные характеристики;
- Характеристики источника питания ПЧ;
- Характеристики управления ПЧ;
- Характеристики защитных функций ПЧ;
- Характеристики размещения, транспортировки, хранения.
Описание процедуры подбора частотного преобразователя для конкретного применения имеет смысл представить в той же последовательности.
Выбор преобразователя частоты по энергетическим и внешним характеристикам
Подбор электродвигателя не входит в задачи данного обзора, поэтому будем считать, что проектант имеет исчерпывающую информацию о двигателе и свойствах нагрузки. Когда речь идет о мощности двигателя, подразумевается механическая мощность на валу. Для оценки потребляемой двигателем (входной) мощности, т. е. мощности нагрузки ПЧ, следует учитывать к.п.д. (η) и коэффициент мощности (cos φ) двигателя. Момент на валу двигателя принято представлять двумя составляющими: статической и динамической. Первая – момент, расходуемый на преодоление сил сопротивления и трения в рабочем механизме. Вторая – момент, расходуемый на преодоление инерции маховых масс самого двигателя, присоединенной трансмиссии и рабочего механизма.
Существует довольно обширный класс промышленных механизмов, в которых момент на валу электродвигателя однозначно связан со скоростью вращения, а пуско-тормозные режимы составляют незначительную часть рабочего цикла. К ним относятся центробежные насосы и вентиляторы, транспортеры, конвейеры, рольганги и т. п. В этих случаях подобрать ПЧ можно по мощности двигателя: паспортная мощность ПЧ (Sпч) должна быть больше или равна мощности, потребляемой двигателем по цепи питания.
Sпч ≥ [k * Pдв] / [η * cos φ]
Здесь Pдв – паспортное значение мощности электродвигателя; k – коэффициент искажений кривой тока ПЧ, учитывающий ШИМ – модуляцию выходного напряжения.
Для преобразователей, предназначенных для работы в составе транспортеров и конвейеров характерна перегрузочная способность до 150%, а в приводах вентиляторов и насосов – до 120%. С учетом этого, в отдельных случаях можно выбирать преобразователь на ступень ниже по мощности.
Подход меняется в тех случаях, когда в нагрузке привода значительную роль играет динамическая составляющая. Это характерно для механизмов с существенно непостоянным моментом инерции рабочей машины или когда режимы разгона, торможения и реверса повторяются часто или существенно ограничены по времени. К таким относятся приводы металлургического и подъёмно-транспортного оборудования, металлообрабатывающих станков, электротранспорта и т. п.
Из двух элементов привода – ПЧ и электродвигателя – второй существенно «крепче» в электротехническом отношении. В асинхронном двигателе с короткозамкнутым ротором, например, при прямом пуске ток может достигать величины, в 5…7 раз превышающей номинальный, а в отдельных случаях – до 12. Если при этом температура обмоток не превысит установленную, такой режим обходится без последствий. Преобразователь частоты обладает гораздо более скромными возможностями из-за ограничений силовых полупроводниковых приборов. В большинстве моделей ПЧ предельная перегрузка допустима в диапазоне 120…200% по отношению к номинальному току. Поскольку ток двигателя напрямую определяет усилие на валу, то очевидно, что динамические возможности привода будут определяться токоограничением ПЧ. В этих случаях, помимо выбора ПЧ по мощности, обязательна проверка преобразователя по предельному току при выполнении разгона максимальной интенсивности, или наоборот, возможность обеспечения времени разгона при предельном токе ПЧ. Для случая постоянного ускорения можно воспользоваться известными соотношениями для действующего значения предельного тока (Iпр) и времени разгона (∆tр):
Iпр =[k*(Mст +Mдин)*∆n] / [9,55* η * cos φ*√3*Uл]
Mдин = [J*∆n] / [9,55*∆tр]
Здесь: ∆n – приращение скорости в течение переходного процесса (об/мин); Mст – статическая составляющая момента вала двигателя (обычно – паспортное значение номинального момента, н*м); Mдин – динамическая составляющая момента двигателя (н*м); Uл – линейное напряжение, подводимое к двигателю (действующее значение, В); J – суммарный момент инерции всего механизма и двигателя, приведенный к валу двигателя (н*м/сек²).
Если предельный ток Iпр превышает ток ограничения ПЧ, или время разгона ∆tр больше, чем требуемое, нужно выбирать преобразователь стоящий выше по шкале мощностей. Иногда производитель ПЧ указывает допустимое время разгона при предельно допустимом токе – до 60 сек.
Правильный выбор ПЧ невозможен без учета решений по режимам торможения. Выбор определяет не только модель ПЧ, но и стоимость. Применяются три основных метода:
Рекуперативное торможение с отдачей энергии в питающую сеть. Наиболее выгодно с энергетической стороны, однако увеличиваются капитальные затраты. ПЧ, обладающие такой функцией, относительно дороги. Для прочих необходима установка дополнительных рекуперационных модулей, что так же влечет увеличение капитальных затрат. Окупаемость таких затрат реальна в приводах, работающих в режимах часто повторяющихся пусков, торможений и реверсов (например – электротранспорт);
Динамическое торможение с разрядом энергии промежуточного звена преобразователя на дополнительное сопротивление. ПЧ этих моделей снабжаются встроенным модулем тормозного прерывателя. В приводах небольшой мощности встроенным может быть и тормозной резистор, однако, чаще всего это внешнее устройство, требующее так же дополнительных затрат.
В двух этих случаях для оценки тока нагрузки ПЧ или времени движения могут использоваться приведенные выше соотношения. При этом должен быть изменен на противоположный знак статического момента Mст (а в некоторых случаях и его числовое значение).
Торможение противовключением. Обмотка двигателя подключается к постоянному напряжению; возникающий магнитный поток способствует появлению тормозного усилия, при этом энергия рассеивается на обмотках двигателя и в источнике постоянного напряжения. Способ дешевый, но, ввиду значительного нагрева, применим только при очень небольших скоростях.Учет характеристик сети питания при выборе преобразователя частоты
После согласования величин напряжения, количества фаз и частоты питающей сети, очень важно оценить реальные диапазоны колебаний этих характеристик в реальных условиях эксплуатации. Значительные динамические нагрузки ПЧ способствуют сильным колебаниям питающего напряжения. Оценить это можно, зная реактивное сопротивление питающей сети или, хотя бы, частичного импеданса, вносимого питающим трансформатором и подводящими кабелями. Ситуация усугубляется в случаях, когда для ПЧ обязательно применение сетевого дросселя. Падение напряжения питания ПЧ при максимальных нагрузках должно оставаться в допустимых пределах. В противном случае необходимо определить: позволяют ли функциональные возможности ПЧ сохранить работоспособность рабочего механизма при провале питающего напряжения. Этот вопрос рассмотрен далее, в разделе выбора ПЧ по некоторым защитным функциям.
Выбор преобразователя частоты по характеристикам управления
Главный вопрос подбора ПЧ по этим критериям – выбор метода управления: скалярный или векторный. Это вплотную касается как реализации технологических требований к приводу, так и стоимости. Выбор определяется требуемым диапазоном и точностью регулирования частоты и характером нагрузки двигателя. Различают 4 метода управления:
Скалярный метод: подходит для электроприводов с известной взаимозависимостью момента двигателя и частоты вращения. При этом диапазон регулирования должен быть невелик, минимальная частота 5…10 Гц.
Скалярный метод управления с обратной связью по скорости. Применяется для точного поддержания и регулирования скорости механизма. И здесь необходимо знать точную взаимозависимость нагрузки и скорости.
Обычно в режиме скалярного управления реализуется определенного вида соотношение U/f (питающее напряжение к частоте питающего напряжения). Этот метод лучше всего подходит для вентиляторов, центробежных насосов, транспортеров, конвейеров.
Векторный метод управления. Применяется в случаях, когда взаимозависимость момента и скорости не известна, случайна или аналитически не выражается. Но при этом необходимо поддерживать заданное значение момента нагрузки при широком диапазоне регулирования скорости.
Векторный метод управления с обратной связью по скорости. Применяется в механизмах со сложным характером нагрузки при необходимости поддерживать и момент, и скорость в широком диапазоне и с высокой точностью.
Возможность реализации векторного метода управления подразумевает присутствие в составе ПЧ относительно мощного процессора, способного в течение нескольких десятков миллисекунд произвести полный пересчет всего вектора параметров привода. Это влияет на стоимость ПЧ. В качестве датчика скорости обычно применяется инкрементальный энкодер, не всегда присутствующий в базовой комплектации. При выборе ПЧ и метода управления должно быть учтено увеличение капитальных затрат, связанное с этими обстоятельствами.Выбор преобразователя частоты по некоторым защитным функциям
Выпускаемые модели ПЧ обладают богатым набором защитных функций, незначительно отличающимся у отдельных моделей. Поэтому подбор ПЧ по защитным функциям важнее проводить с точки зрения наличия возможностей, обеспечивающих сохранение работоспособности привода в аварийном режиме. Необходимо установить, каковы действия преобразователя после срабатывания защитных функций:
Каким образом будет тормозиться рабочий механизм после отключения преобразователя. Торможение «на выбеге» не всегда приемлемо по соображениям безопасности.
Возможно ли сохранение работы привода с пропорциональным изменением скорости или автоматический перезапуск (например, при отключении сети питания), «подхват» вращающегося двигателя в установках, обладающих эффектом «ветряной мельницы», или двигающегося по инерции (при восстановлении питания) и т. п.Если имеющиеся функциональные возможности обеспечивают сохранение работоспособности привода или даже обеспечивают приемлемый режим его работы, то можно считать, что вопрос выбора ПЧ по критериям защитных функций решен.
Учет факторов размещения при подборе преобразователей частоты
Место установки и эксплуатации ПЧ должно полностью удовлетворять паспортным требованиям по температурному диапазону, влажности, высоте положения, условиям вибрации и запыленности, степени защиты по IP. Однако есть один неочевидный момент, влияющий на выбор ПЧ при конкретных условиях размещения. Существенным является расстояние удаленности преобразователя от электродвигателя. При превышении определенного расстояния, зависящего от модели ПЧ, типа кабеля, тока двигателя и др., необходима установка специального моторного дросселя. Появление этого элемента снижает эффективные характеристики привода. В качестве альтернативы возможен переход к другой модели ПЧ.
Техотдел компании РусАвтоматизация
Дата публикации статьи: 2017-06-08 |
| Хотите сохранить
эту статью? Скачайте
её в формате PDF | | Остались вопросы?
Обсудите эту статью
на нашей странице В Контакте | | Хочешь читать статьи
первым, подписывайся на
наш канал в Яндекс.Дзен
|
Рекомендуем прочитать также:
Применение сетевых дросселей для преобразователей частоты.
Управление преобразователем частоты INNOVERT с помощью сенсорной панели оператора LSIT07.
Управление шнековым питателем в аварийном режиме.
Оценка статьи:

Загрузка...











 Одним из важных направлений снижения энергопотребления является внедрение энергосберегающего оборудования, к которому в первую очередь относится частотно-регулируемый электропривод (ЧРП) – асинхронный электродвигатель, управляемый от преобразователя частоты.
Одним из важных направлений снижения энергопотребления является внедрение энергосберегающего оборудования, к которому в первую очередь относится частотно-регулируемый электропривод (ЧРП) – асинхронный электродвигатель, управляемый от преобразователя частоты.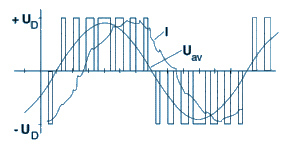 В преобразователях частоты используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды.
В преобразователях частоты используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды.