

Классификация систем автоматического управления

Классифицировать системы автоматического управления можно по методу управления и функциональному признаку. По методу управления все системы делятся на два больших класса: обыкновенные (несамонастраивающиеся) и самонастраивающиеся (адаптивные).
Обыкновенные системы , относящиеся к категории простых, не изменяют своей структуры в процессе управления. Они наиболее разработаны и широко применяются в литейных и термических цехах. Обыкновенные системы автоматического управления подразделяют на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
Разомкнутые системы автоматического управления в свою очередь делят на системы автоматического жесткого управления (САЖУ) и системы управления по возмущению.
У первых систем регулятор воздействует на объект управления независимо от полученного результата, т. е. значения регулируемой величины и внешнего возмущения. Системы управления по возмущению работают по принципу, когда управляющее воздействие вырабатывается в зависимости от внешнего возмущения, оказывающего влияние на объект управления.
В качестве примера можно рассмотреть систему отопления литейного или термического цеха. В этом случае расход горячей воды в теплотрассе цеха зависит от внешних погодных условий. Чем холоднее на улице, тем больше подается горячей воды в батареи отопления, и наоборот.
Замкнутые системы автоматического управления , работающие по принципу отклонения, называют также системами автоматического регулирования (САР). Их отличительной чертой является наличие замкнутого контура прохождения сигналов, т. е. наличие обратного канала, по которому информация о состоянии регулируемой величины передается на вход элемента сравнения.
Системы автоматического регулирования предназначены для решения трех задач: стабилизации регулируемой величины (стабилизирующая САР), изменения регулируемой величины по известной (программная САР) или неизвестной (следящая САР) программам.
В стабилизирующих САР заданное значение регулируемой величины постоянно. Примером такой системы может служить система регулирования температуры в рабочем пространстве термической печи. В программных САР значение регулируемой величины изменяется во времени по заранее разработанной (известной) программе.
В следящих системах заданное значение регулируемой величины изменяется во времени по заранее неизвестной программе. Следящие и программные САР отличаются от стабилизирующих принципом обработки задающего сигнала.
Наиболее типичным примером следящего регулирования является автоматическое поддержание заданного соотношения между расходами топлива и воздуха при регулировании процесса горения в топливных плавильных и нагревательных печах.
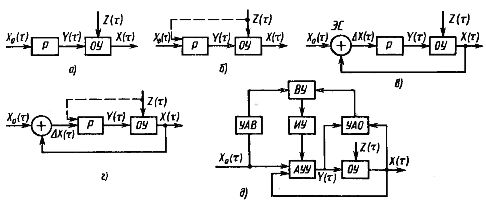
Системы автоматического управления: а — разомкнутая, б — разомкнутая по отклонению, в — замкнутая, г — комбинированная, д — самонастраивающаяся, Р — регулятор, ОУ — объект управления, ЭС — элемент сравнения, УАВ — устройство анализа задающего воздействия: ВУ — вычислительное устройство, ИУ — исполнительное устройство, АУУ — автоматическое управляющее устройство, УАО — устройство анализа объекта управления.
Комбинированные системы сочетают в себе достоинства систем управления по отклонению и по возмущению, что повышает точность управления. Действие неучтенных возмущений в комбинированных системах компенсируется или ослабляется управлением по отклонению.
Самонастраивающиеся (адаптивные) системы можно разделить на три подкласса: экстремальные системы, системы с самонастройкой параметров и системы с самонастройкой структуры.
Системами экстремального регулирования называют системы стабилизирующего, следящего или программного управления, у которых настройка, программа или закон воспроизведения автоматически изменяются в зависимости от изменения внешних условий или внутреннего состояния системы с целью создания наивыгоднейшего (оптимального) режима работы объекта управления.
В таких системах вместо постоянной настройки или программы устанавливается устройство автоматического поиска, которое проводит анализ какой-либо характеристики объекта (коэффициента полезного действия, производительности, экономичности и т. п.) и в зависимости от полученного результата подает в управляющее устройство требуемое значение регулируемой величины так, чтобы данная характеристика получила экстремальное значение при непрерывном изменении различных возмущающих воздействий, оказывающих влияние на условия работы системы.
В системах с самонастройкой параметров при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (не по заранее заданной программе) изменение варьируемых параметров управляющего устройства с целью обеспечения устойчивой работы системы и поддержания регулируемой величины на заданном или оптимальном уровне.
В системах с самонастройкой структуры при изменении внешних условий и характеристик объекта управления происходит переключение элементов в схеме соединений или введение в нее новых элементов. Целью таких изменений (отбора) структуры является достижение лучшего решения задачи управления.
Отбор структуры осуществляется путем автоматического поиска с применением вычислительных и логических операций. Такие системы должны не только приспосабливаться ко всем изменениям внешних условий и характеристик объекта, но и функционировать нормально даже при наличии неполадок или отказов отдельных элементов, создавая новые цепи взамен нарушенных. Системы с самонастройкой структуры можно заставить самосовершенствоваться, “приобретать опыт” путем быстрого опробования нескольких вариантов, отбора и “запоминания” лучшего из них.
Согласно классификации по функциональному признаку все автоматические системы управления подразделяют на четыре класса :
системы для координации работы механизмов,
системы регулирования параметров технологических процессов,
системы автоматического контроля,
системы автоматической защиты и блокировки.

Системы, предназначенные для координации работы отдельных механизмов установки или установки в целом, являются системами автоматического жесткого управления (САЖУ) .
Системы автоматического регулирования (САР) технологических процессов обеспечивают поддержание регулируемой величины на заданном уровне или изменение ее по заданной программе.
Системы автоматического контроля (САК) содержат средства и методы для получения информации о текущих значениях параметров технологических процессов (температуры, давления, запыленности или загазованности воздуха и др.) без непосредственного участия человека.
Системы автоматической защиты (САЗ) и блокировки (САБ) предотвращают возникновение, аварийных ситуаций в работе оборудования при установившемся режиме.
Системы автоматики – классификация
Автоматические системы, используемые в строительных машинах и оборудовании для контроля, регулирования и управления, можно классифицировать по ряду признаков.
По характеру алгоритма управления различают системы по разомкнутому и замкнутому (с обратной связью) циклам, а также комбинированные системы. В первом случае в системе отсутствует обратная связь и управление является жестким. В такой системе (рис. 10.2, а) задающий сигнал X поступает в управляющее устройство УУ, из которого сигнал управляющего воздействия УВ направляется к объекту управления ОУдля получения выходных координат Y с учетом возможного воздействия сторонних помех F. При управлении по замкнутому циклу (рис. 10.2, б) в случае отклонения выходного параметра от заданного значения сигнал возвращается объектом управления на управляющее устройство для корректировки. Такие системы работают с изменяемыми структурой и законом управления. Комбинированное управление (рис. 10.2, в) характеризуется наличием в системе обратной связи и резервного управляющего устройства, подключаемого параллельно первому через элемент сравнения (анализатор). Установленные на схемах знаки «плюс» и «минус» характеризуют положительные или отрицательные значения задающего воздействия.
В зависимости от числа каналов обратной связи различают одноконтурные и многоконтурные системы. В последних всегда более одной замкнутой цепи воздействия.
Рекламные предложения на основе ваших интересов:
По характеру применяемых сигналов различают непрерывные и дискретные (импульсные, релейные) системы.
По характеру изменения сигналов задатчика системы делят на стабилизирующие, программного управления и следящие. В стабилизирующих системах по поступающим постоянным сигналам выходные параметры поддерживаются практически с постоянными значениями (например, стабилизация температуры двигателя). В системах программного управления сигналы из задающего устройства меняются по заранее установленным законам и выходные параметры также изменяются во времени и пространстве. В следящих системах значения заранее неизвестны и из блока задающего устройства поступают случайно изменяющиеся сигналы, измеряемые соответствующими датчиками. Эти системы, в свою очередь, делятся на автономные, копирные и комбинированные.
По количеству выходных параметров различают одномерные и многомерные системы.
По расположению измерительных и сигнальных устройств относительно управляемого объекта и по его расположению относительно пульта автоматические контроль и управление разделяют на местные и дистанционные. Местный контроль и управление наибольшее распространение получили в передвижных, в том числе в строительных машинах. Дистанционный контроль и управление используют при одновременной работе с несколькими машинами или для приближения его к месту выполнения технологических операций рабочим органом машины. При этом значительно увеличивается роль каналов связи, осуществляющих передачу сигналов на расстояние. В качестве каналов связи используются механические, гидравлические, пневматические, электрические и комбинированные (смешанные) передачи.
Для лучшего усвоения материала рассмотрим блок-схемы основных автоматических систем, используемых для контроля, управления и регулирования.
При использовании в качестве конечного элемента сигнального преобразователя (рис. 10.3, 6) система автоматического контроля усложняется. В этом случае контролируемая величина а объекта О также подается на датчик Д. Однако в дальнейшем сигнал си от датчика поступает в сравнивающее устройство (анализатор) А. В анализаторе происходит сравнение сигнала а с сигналом сц, который должен быть равен сигналу а в соответствии с заданным значением величины а. При несовпадении сигналов а и аг анализатор посылает сигнал Аа об отклонении контролируемой величины а от заданного параметра. После прохождения усилителя У сигнал Aai поступает на сигнальный преобразователь СП. В отличие от рассмотренных схем автоматического контроля в системах прямого действия отсутствует усилитель.
По числу контролируемых величин различают единичный и множественный автоматический контроль, в одном из которых осуществляется контроль только одного параметра рабочего процесса и только в одном месте, а во втором — контроль нескольких параметров или одного параметра в нескольких местах при выполнении определенного технологического процесса. Множественный контроль, в свою очередь, делится на параллельный, последовательный и смешанный, представляющий сочетание из двух основных. При параллельном контроле используется необходимое количество каналов, обеспечивающих контроль всех измеряемых параметров во всех местах их расположения. Последовательный контроль позволяет получить информацию от нескольких датчиков к одному сигнальному преобразователю или же датчик имеет возможность перемещаться поочередно к различным местам получения информации.
Системы автоматической защиты (САЗ) также работают по разомкнутому циклу и в большинстве случаев являются системами непрямого действия, так как для подачи звуковых и световых предупреждающих сигналов, а также для отключения энергоснабжения машины или отдельных ее узлов мощность сигнала, получаемого от датчика, недостаточна. В отличие от блок-схемы системы автоматического контроля здесь в конце цепи обычно используют реле или контактор, отключающие управляющие цепи привода объекта, а также применяют параллельное включение различных датчиков на один сигнальный прибор или устройство релейной защиты.
Рис. 10.4. Блок-схема САУ
В блок-схеме этого управления (рис. 10.4) задающий сигнал а поступает в управляющее устройство УУ, из которого сигнал а о необходимости управления объектом поступает в усилитель У. Усиленный сигнал аг поступает в исполнительный орган ИО, оказывающий требуемое воздействие аз на объект управления ОУ.
Автоматическое управление бывает непрерывным и дискретным, по количеству управляемых объектов — единичным и множественным, а также местным и дистанционным. Примером местного единичного управления является работа однозубого рыхлителя по заданной программе. Дистанционное множественное управление широко используется в асфальто- и цементобетонных установках и заводах. В основном это программное управление различными технологическими процессами.
Системы автоматического регулирования (САР) являются разновидностью автоматического управления и предназначены для сопоставления действительного значения параметров выполняемого процесса с заданным и с дальнейшим управлением объектом в зависимости от результатов сопоставления (т. е. управление с использованием информации о результатах управления).
В соответствии с этим система автоматического регулирования осуществляет не только управление объектом, но и одновременный контроль за его правильной работой. Следует также отметить, что в системах автоматического регулирования рассматривается совместная работа регулируемого объекта и регулирующих устройств.
К регулирующим устройствам относятся автоматические регуляторы, позволяющие без участия человека выдерживать заданные параметры с требуемой степенью точности. Так как автоматический регулятор воздействует на регулируемый объект, а регулируемые параметры воздействуют на регулятор, вызывая в нем требуемое управляющее воздействие, цепь воздействия оказывается замкнутой и система работает с обратной связью.
В соответствии с используемой, по характеру изменения сигналов задатчика, системой (стабилизирующая, программная, следящая) изменяется и состав автоматического регулятора. Однако в общем случае блок-схема практически не изменяется. Рассмотрим состав и работу блок-схемы системы автоматического регулирования для ее различных видов.
При значительном расхождении параметров а и аг анализатор подает о полученной разнице сигнал Да = с в усилитель У. Усиленный сигнал с поступает в исполнительный орган ИО, изменяющий рассогласованный сигнал и передающий отрегулированное воздействие сг на объект регулирования ОР.
При различных видах систем автоматического регулирования в них вводятся дополнительные устройства.
В стабилизирующей САР вводится задатчик 3, подающий постоянный сигнал аг (соответствующий такому сигналу а, который появляется в датчике Д при соразмерности регулируемого параметра а заданному постоянному значению) в анализатор А.
В программной САР сигнал аг, изменяющийся по заданному закону во времени, подается в анализатор А также от задатчика. Однако для перемещающихся во время работы машин, регулируемые параметры которых изменяются по заданной функции пути, сигнал задатчика связан с длиной пройденного пути, измеряемого дополнительным датчиком времени или пройденного пути Д2.
Различают САР прямого и непрямого действия, непрерывные и дискретные, одно- и многоконтурные и т. д.
Наряду с вышерассмотренными, в системе автоматического регулирования используется и самонастраивающая (адаптивная) система, определяющая путем автоматического поиска такое значение регулируемого параметра, которое обеспечивает наивыгоднейший режим работы регулируемого объекта при изменяющихся условиях его работы.
В качестве рабочих элементов в автоматических системах управления, регулирования, контроля и защиты используются датчики и устройства контроля и регулирования, усилители, микропроцессоры и исполнительные механизмы.
КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИКИ
Автоматические системы, используемые в строительных :мащинах. и оборудовании для контроля, регулирования и управления, можно классифицировать по ряду признаков.
По характеру алгоритма управления различают системы по разомкнутому и замкнутому (с обратной связью) циклам, а также комбинированные системы. В первом случае в системе отсутствует обратная связь и управление является жестким. В такой системе (рис.3,а) задающий сигнал Х поступает в управляющее устройство УУ, из которого сигнал управляющего воздействия УВ направляется к объекту
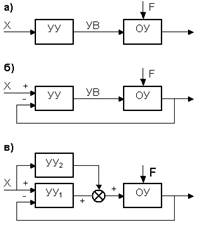 Рис.3. Системы автоматического управления: а — по разомкнутому циклу; б — по замкнутому циклу; в ‑ по комбинированной схеме Рис.3. Системы автоматического управления: а — по разомкнутому циклу; б — по замкнутому циклу; в ‑ по комбинированной схеме |
управления ОУ для получения выходных координат У с учетом возможного воздействия сторонних помех F. При управлении по замкнутому циклу (рис.3,б> в случае отклонения выходного параметра от заданного значения сигнал возвращается объектом управления на управляющее устройство для корректировки, Такие системы работают с изменяемыми структурой и законом управления. Комбинированное управление (рис.3,в) характеризуется начием в системе обратной связи и резервного управляющего устройства, подключаемого параллельно первому через элемент сравнения (анализатор). Установленные на схемах знаки «плюс» и «минус» характеризуют положительные или отрицательные значения задающего воздействия.
Устройства обратной связи объединяют под понятием «регуляторы», которые различают как регуляторы прямого (использующие энергию объекта) и непрямого (требующие дополнительного электроснабжения— усилителя) действия. В зависимости от числа каналов обратной связи различают одноконтурные и многоконтурные системы, и последних всегда более одной замкнутой цепи воздействия.
По характеру применяемых сигналов различают непрерывные и дискретные (импульсные, релейные) системы.
По характеру изменения сигналов задатчика системы делят на стабилизирующие, программного управления и следящие. В стабилизирующих системах по поступающим постоянным сигналам выходные параметры поддерживаются практически с постоянными значениями (например, стабилизация температуры двигателя). В системах программного управления сигналы из задающего устройства меняются по заранее установленным законам и выходные параметры также изменяются во времени и пространстве. В следящих системах значения заранее неизвестны и из блока задающего устройства поступают случайно изменяющиеся сигналы, измеряемые соответствующими датчиками. Эти системы, в свою очередь, делятся на автономные, копирные и комбинированные.
По количеству выходных параметров различают одномерные и многомерные системы.
По расположению измерительных и сигнальных устройств относительно управляемого объекта и по его расположению относительно пульта автоматические контроль и управление разделяют на местные и дистанционные. Местный контроль и управление наибольшее распространение получили в передвижных, в том числе в строительных машинах. Дистанционный контроль и управление используют при одновременной работе с несколькими машинами или для приближения его к месту выполнения технологических операций рабочим органом машины. При этом значительно увеличивается роль каналов связи, осуществляющих передачу сигналов на расстояние. В качестве каналов связи используются механические, гидравлические, пневматические, электрические и комбинированные (смешанные) передачи.
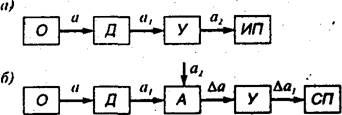 Рис.4. Блок-схемы САК Рис.4. Блок-схемы САК |
Рассмотрим блок-схемы основных автоматических систем, используемых для контроля, управления и регулирования. Системы автоматического контроля (САК) работают по разомкнутому циклу и могут быть как прямого, так и непрямого действия. В блок-схеме системы автоматического контроля непрямого действия (рис.4,а). контролируемая величина а с объекта О, осуществляющего производственный процесс, подается на датчик Д, передающий сигнал а1 дальше на усилитель У, от которого сигнал а3 поступает на измерительный преобразователь ИП.
При использовании в качестве конечного элемента сигнального преобразователя (рис.4,б) система автоматического контроля усложняется. В этом случае контролируемая величина а объекта О также подается на датчик Д. Однако в дальнейшем сигнал а1 от датчика поступает в сравнивающее устройство (анализатор) А. В анализаторе происходит сравнение сигнала а1 с сигналом а2, который должен быть равен сигналу а1 в соответствий с заданным значением величины а. При несовпадении сигналов а1 и а2 анализатор посылает сигнал Δа об отклонении контролируемой величины аот заданного параметра. После прохождения усилителя У сигнал Δа1 поступает на сигнальный преобразователь СП. В отличие от рассмотренных схем автоматического контроля в системах прямого действия отсутствует усилитель.
По числу контролируемых величин различают единичный и множественный автоматический контроль, в одном из которых осуществляется контроль только одного параметра рабочего процесса и. только в одном месте, а во втором — контроль нескольких параметров или одного параметра в нескольких местах при выполнении определенного технологического процесса. Множественный контроль, в свою очередь, делится на параллельный, последовательный и смешанный, представляющий сочетание из двух основных. При параллельном контроле используется необходимое количество каналов, обеспечивающих контроль всех измеряемых параметров во всех местах их расположения. Последовательный контроль позволяет получить информацию от нескольких датчиков к одному сигнальному преобразователю или же датчик, имеет возможность перемещаться поочередно к различным местам получения информации.
Системы автоматической защиты (САЗ) также работают по разомкнутому циклу и в большинстве случаев являются системами непрямого действия, так как для подачи звуковых и световых предупреждающих сигналов, а также для отключения энергоснабжения машины или отдельных ее узлов мощность сигнала, получаемого от датчика, недостаточна. В отличие от блок-схемы системы автоматического контроля здесь в конце цепи обычно используют реле или контактор, отключающие управляющие цепи привода объекта, а также применяют параллельное включение различных датчиков на один сигнальный прибор или устройство релейной защиты.
Системы автоматического управления (САУ) в основном работают по разомкнутому циклу, так как не получают информацию о действительном протекании технологического процесса, и практически всегда являются непрямого действия: В блок-схеме этого управления. (рис.5) задающий сигнал а поступает в управляющее устройство УУ, из которого сигнал а1 о необходимости управления объектом поступает в
 Рис.5. Блок схема САУ Рис.5. Блок схема САУ |
усилитель У. Усиленный сигнал а2 поступает в исполнительный орган ИО, оказывающий требуемое воздействие а3 на объект управленияОУ. Автоматическое управление бывает непрерывным и дискретным, по количеству управляемых объектов — единичным и множественным, а также местным и дистанционным. Примером местного единичного управления является работа однозубого рыхлителя по заданной программе.
Дистанционное множественное управление широко используется в асфальто- и цементобетонных установках и заводах.
Системы автоматического регулирования (САР) являются разновидностью автоматического управления и предназначены для сопоставления действительного значения параметров выполняемого процесса с заданным и с дальнейшим управлением объектом в зависимости от результатов сопоставления (т.е. управление с использованием информации о результатах управления).
В соответствии с этим система автоматического регулирования осуществляет не только управление объектом, но и одновременный контроль за его правильной работой. Следует также отметить, что в системах автоматического регулирования рассматривается совместная работа регулируемого объекта и регулирующих устройств.
К регулирующим устройствам относятся автоматические регуляторы, позволяющие без участия человека выдерживать заданные параметры с требуемой степенью точности. Так как автоматический регулятор воздействует на регулируемый объект, а регулируемые параметры воздействуют на регулятор, вызывая в нем требуемое управляющее воздействие, цепь воздействия оказывается замкнутой и система работает с обратной, связью.
В соответствии с используемой, по характеру изменения сигналов задатчика, системой (стабилизирующая, программная, следящая) изменяется и состав автоматического регулятора. Однако в общем случае блок-схема практически не изменяется. Рассмотрим состав и работу блок-схемы системы автоматического регулирования для ее различных видов.
Блок-схема системы автоматического регулирования (рис.6) включает в себя объект регулирования ОР и автоматический регулятор АР, все элементы которого расположены внутри прямоугольника, обозначенного на схеме пунктиром. Регулируемый параметр а поступает из объекта регулирования ОР на датчик Д, откуда сигнал а1 поступает в анализатор А, где сопоставляется с заданным значением регулируемого параметра а2– При значительном расхождении параметров а1 и а2 анализатор подает о полученной разницесигнал Δа=с в усилитель У. Усиленный сигнал с1 поступает в исполнительный орган ИО; изменяющий рассогласованный сигнал и передающий отрегулированное воздействие с2 на объект регулирования ОР.
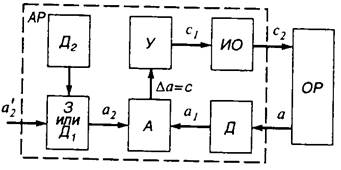 Рис.6. Блок схема САР Рис.6. Блок схема САР |
При различных видах систем автоматического регулирования в них вводятся дополнительные устройства.
В стабилизирующей САР вводится задатчик З, подающий постоянный сигнал а2 (соответствующий такому сигналу а1, который появляется в датчике Д при соразмерности регулируемого параметра азаданному постоянному значению) в анализатор А.
В программной САР сигнал а2, изменяющийся по заданному закону во времени, подается в анализатор А также от задатчика З. Однако для перемещающихся во время работы машин, регулируемые параметры которых изменяются по заданной функций пути, сигнал задатчика связан с длиной пройденного пути, измеряемого дополнительным датчиком времени или пройденного пути Д2.
В следящей САР вместо задатчика используется дополнительный датчик Д1, измеряющий значение внешней переменной величины а2 в соответствии с которой регулируется параметр а. Различают САР прямого и непрямого действия, непрерывные и дискретные, одно- и многоконтурные и т.д.
Наряду с вышерассмотренными, в системе автоматического регулирования используется и самонастраивающаяся (адаптивная) система, определяющая путем автоматического поиска такое значение регулируемого параметра, которое обеспечивает наивыгоднейший режим работы регулируемого объекта при изменяющихся условиях его работы.
В качестве рабочих элементов в автоматических системах управления, регулирования, контроля и защиты используются датчики и устройства контроля и регулирования, усилители, микропроцессоры и исполнительные механизмы.
| | | следующая лекция ==> | |
| АВТОМАТИЗАЦИЯ СТРОИТЕЛЬНЫХ МАШИН И ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ В СТРОИТЕЛЬСТВЕ | | | Структура строительной машины |
Дата добавления: 2018-06-28 ; просмотров: 292 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Системы автоматики. Виды и особенности применения
Отрасль техники и науки, которая объединяет теорию и методы проектирования системы автоматики, и устройств, способных выполнять свою основную работу без человека, называется автоматикой.
Классификация и особенности применения
По назначению и характеру выполняемых работ системы автоматики разделяют:
- Системы автоматического контроля служат для контроля некоторого процесса, и включают в себя датчик, усилитель, который принимает сигнал, элемент Р, реализующий последнюю операцию контроля – преобразование результата в удобной форме. Исполнительным элементом может выступать звуковой сигнал, любое другое сигнализирующее устройство ( системы сигнализации ) .
В автоматическую систему контроля входят распределители, блоки питания, стабилизаторы и другие компоненты. Независимо от числа компонентов такие системы разомкнутые, а сигнал идет в одном направлении: от контролируемого объекта Е к исполнительному компоненту Р.
- Системы автоматического управления служат для управления некоторым техпроцессом, используются для автоматизации процессов запуска, регулировки скорости вращения и реверса электромоторов в приводах механизмов.
Одной из разновидности этой системы является система автоматической защиты. Она предотвращает наступление предельного и аварийного режимов, прекращая в необходимый момент работу. - Системы автоматического регулирования удерживают регулируемый параметр в определенных пределах. Это является наиболее сложной автоматической системой, которая объединяет в себе управление и осуществление контроля. Одним из компонентов систем является регулятор.
При выполнении этой системой всего одной задачи по поддержанию постоянного значения параметра, они называются системами стабилизации . Имеются процессы, нуждающиеся в изменении параметра по времени. Такие системы получили название систем программного регулирования .
Для создания стабильности регулируемого параметра применяют различные принципы и методы работы.
При регулировке по отклонению элемент UN сравнивает действительное напряжение Uф с заданной величиной Uз, определяемой элементом ЕN. После этого на выходе UN возникает сигнал ΔU = Uз-Uф, который прямо зависит от отклонения напряжения. Сигнал протекает через усилитель А, далее идет на рабочий орган L. Из-за колебания напряжения на обмотке, изменяется действительное напряжение генератора, который изменяет его отклонение.

Усилитель, который не меняет принцип работы системы, нужен для ее реализации, в то время, когда не хватает мощности сигнала для действия на рабочий орган.
Вместе с задающим действием на систему влияют факторы, образующие отклонения регулируемого параметра. Изменение температуры внешней среды изменяет сопротивление в схеме обмотки возбуждения. Это оказывает влияние на напряжение генератора. Независимо от того, где будут возникать действия Q, система регулирования среагирует на возникшее отклонение регулируемого параметра.
Регулирование по возмущению нуждается в специальных компонентах, которые измеряют действие Q и влияют на рабочий орган. В системе, действующей по такому принципу, значение регулируемого параметра не берется в расчет. Учитывают только нагрузочный ток Iн. Изменение магнитодвижущей силы возбуждающей обмотки, которая является измерительным компонентом системы, происходит при изменении нагрузочного тока. Это приводит к изменению выходного напряжения генератора.

Комбинированная система образуется объединением разных систем в одну.

По принципу действия системы автоматики делятся:
- Статические системы контролируют регулируемый параметр, который не имеет стабильного значения, и с повышением нагрузки меняется на определенное значение, которое называется ошибкой регулирования. Рассмотренные выше системы – это простые статические системы. Ошибка регулирования возникает из-за большего отклонения напряжения для создания большего тока. Напряжение генератора зависит от нагрузочного тока по прямой зависимости. Максимальное отклонение разности потенциалов называется статизмом системы.
- В астатической системе автоматики разность потенциалов на генераторе изменяется регулировкой реостата R, подключенного в цепь возбуждающей обмотки L.

Сервомотор М начинает работать и двигать ползунок реостата, когда возникает сигнал на входе. Ползунок двигается, пока сигнал не обнулится. Система такого типа имеет отличие в том, что для поддержки новой величины тока возбуждения не нужен сигнал на выходе усилителя. Такое отличие и дает возможность избавиться от статизма.
По виду цепи передачи сигналов:
- Разомкнутые . Во время разомкнутой цепи система управления реагирует на воздействия без получения информации о величине регулируемых параметров, и без сравнения результатов работы, а также без возможности корректировки. Такие системы применяются в обеспечении заданной температуры в помещении, в автоматических турникетах и т. д.
- Замкнутые . При замкнутой цепи система управления получает данные о величине параметров, сравнивает их с требуемыми, производит корректировку. Такое замыкание цепи выполняется с помощью обратной связи от управляемой системы к управляющей.
По количеству обратных связей:
- Многоконтурные . Системы, имеющие кроме главного контура обратные связи, называются многоконтурными. В отличие от одноконтурных систем, в многоконтурных системах воздействие к точке системы способно обойти систему и обратно вернуться в первую точку по нескольким различным контурам.
- Одноконтурные . Современные системы автоматики чаще всего имеют параллельные устройства коррекции или обратные связи. Системы, которые регулируют только один параметр с одной обратной связью, называются одноконтурными. В них воздействие на некоторую точку системы может пройти всю систему и обратно вернуться к первой точке, при этом пройдя по одному контуру.
По управлению:
- Следящие системы . К таким системам относятся системы автоматики, в которых сигнал, меняющийся произвольным образом, в результате выходит с допустимой ошибкой. Основной компонент следящей системы – датчик рассогласования. Он определяет ошибку между ведущей и ведомой величинами.
- Программное регулирование . Системы автоматики, заставляющие регулируемый параметр изменяться по заданному программой закону, получили название систем программного регулирования . Программа изменения параметра создается специалистами с учетом поставленной задачи регулирования.
- Автоматическая стабилизация . В системах автоматической стабилизации регулируемый параметр при различных возмущениях, которые действуют на систему, стабилизируется регулятором до постоянной величины.
По связи выходного и входного параметра:
- Непрерывные . В ранних примерах было принято, что действие на рабочий орган осуществлялось непрерывно за все время, пока имеется отклонение регулируемого параметра. Такая система называется системой непрерывного действия .
- В дискретных системах действие на рабочий орган производится ступенчато. Для примера можно рассмотреть работу утюга, в котором регулировка принимает одно из двух положений при изменении температуры. В такой системе регулировка температуры производится коммутацией нагревательного элемента по сигналу датчика. При повышении температуры выше предела датчик разрывает контакт и выключает нагреватель. При уменьшении температуры менее определенного значения, нагреватель подключается. Такая система не находится в устойчивом состоянии, и имеет два положения включения: в меньшую или большую сторону.
- Для создания качественной регулировки автоматики могут содержать специальные устройства, которые являются обратными связями . В них сигнал направлен в противоположную сторону от основного сигнала управления.
По виду источника энергии:
- Пневматические – обеспечивают высокую скорость, применяют энергию сжатого газа.
- Электрические – удобны в работе и легки в передаче информации и ее обработке.
- Гидравлические – обеспечивают повышенную мощность, применяют энергию жидкости.
Телемеханические системы автоматики
Если компоненты системы находятся далеко между собой, то для соединения применяется передатчик, приемник и каналы связи. Поэтому эти системы называются телемеханическими.

Они состоят из управляющего пункта с оператором, пунктов контроля с объектами контроля А1-Ап, каналов передачи L1А-LпА, которые соединяют управляющий пункт Е1М с контрольными пунктами Е2А-Еп. В системе телемеханики по каналам передачи можно передавать многие виды информации.
Система телеизмерения
Если информация передается только о контрольном объекте, то системы называют телеизмерением. В них сигналы от датчика передаются на управляющий пункт Е1М, преобразуются в показания цифровых или стрелочных измерительных приборов. При этом передача информации может происходить непрерывно или с перерывами.
Система телесигнализации
Если от датчика поступает сигнал на пункт управления только о том, включен объект контроля или выключен, такие системы автоматики называются системами телесигнализации.
Телесигнализация выдает данные по управлению объектом контроля, либо служит информацией для решения по управлению в системах телерегулировки и телеуправления. Главным отличием этих систем от других заключается в непрерывности и дискретности сигналов.
А. Элементы автоматики Классификация систем автоматики (стр. 6 из 8)
При поступлении команды считывания на первый конъюнктор одновременно поступает два сигнала, а на второй и третий только один. На первом выходе будет сигнал логической единицы, а на втором и третьем выходах – сигнал логического нуля.
Т.О. информация 1-го источника будет подключена к потребителю, а 2-го и 3-го подключена не будет.
Электронно-цифровые распределители обладают более высоким быстродействием, безинерционностью, но у них более сложная схема.
Основные понятия об исполнительных устройствах.
Исполнительные устройства – это устройства, предназначенные для непосредственного воздействия на управляющий объект с целью осуществления функции автоматического управления или автоматического регулирования.
4. Неэлектрические, пневматические и гидравлические.
К неэлектрическим относятся: электромагнитные и электродвигательные ИУ, которые преобразуют энергию эл. тока в механическую энергию с целью воздействия на объект управления или на его органы (шток, поршень, и др.).
РАЗДЕЛ 2. СИСТЕМЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
15.Основные понятия теории управления.
Автоматическое управление – это комплекс действий, обеспечивающих автоматическое выполнение производственного процесса без участия человека.
Управлением называется совокупность действий, обеспечивающих выполнение производственного процесса с целью получения заданных результатов.
При ручном и полуавтоматическом управлении команды или действия по управлению технологическим процессом выдаются человеком или часть – человеком, а часть – автоматически в полуавтоматических системах.
Системы управления бывают:
1. САР. – система автоматического регулирования.
2. СПУ. – система программного управления.
3. СЗУ. – система зависимого управления.
САР бывает замкнутая и разомкнутая.
1. Замкнутая САР охвачена обратной связью. Осуществляет автоматически выполнение заданной работы с контролем хода его производства или поддерживает значение параметров (одного или нескольких) объекта регулирования в заданных пределах. Например: величина вых. Стабилизированного напряжения источника питания.
2. Разомкнутая САР автоматически выполняет технологический процесс при отсутствии контроля за его ходом. Требует постоянного вмешательства человека для выдачи очередной команды. Не охвачена обратной связью. Для устранения недостатков разомкнутых систем создана СПУ, в которой вместо задающего устройства установлено программное устройство:
Вся командная информация в данном системе записана на программе, в определённой очерёдности на перфолентах, перфокартах, магнитных лентах, жёстких и мягких магнитных дискетах и выдаётся в систему для выполнения технологического процесса. Разомкнутые системы управления нашли широчайшее применение в металлообрабатывающей промышленности и в др. отраслях, где не требуется помехозащита и применение специальных схем, являются наиболее простыми и доступными. Для них не являются критическими внешние возмущения.
В СЗУ учитываются внешние факторы, воздействующие на объект регулирования: температура, влажность, скорость ветра, давление, величины параметров элементной базы и т.д., значительно усложняющие системы управления при выполнении технолог. процесса.
16. Основные понятия о системах регулирования, контроля и сигнализации.
Системой регулирования называется система автоматически поддерживающая величину одного из выходных параметров постоянной с заданной степенью точности.
1.По способу взаимодействия между АР (авт. Регул.) и ОР. Бывают замкнутые и разомкнутые.
Замкнутая САР характеризуется наличием цепи обратной связи между ОР и АР. Действие системы основано на сравнении заданного и текущего выходного параметра, в результате которого вырабатывается управляющее воздействие.
Разомкнутая система является полуавтоматической и не имеет цепи обратной связи, что не даёт возможности контролировать результат регулирования, если АР и ОР разнесены на большие расстояния. Если они находятся в одном помещении, результат контролируется человеком.
2.По назначению и по выполняемым функциям АСР разделяются на:
1.стабилизирующие – поддерживающие постоянным значение одного из входных параметров;
2.программные САР – обеспечивают изменение выходного параметра по одному или по нескольким (поочерёдно или послед.) изменение математических законов, записанных в программе;
3.следящие САР обеспечивают соответствующие изменения регулируемой величины от неизвестной заранее переменной величины.
3. По наличию источника питания АСР бывают:
1.Прямого действия, при этом источник питания АСР отсутствует. Для работы используется энергия измерительного устройства.
2.Системы не прямого действия, в которых используется вспомогательный источник питания АСР.
4.По своему роду АСР бывают:
5.По характеру действия:
1.непрерывного действия, вырабатывающие аналоговые сигналы.
2.дискретного действия на цифровых схемах, вырабатывают дискретные сигналы в виде импульсов.
6.По количеству регулируемых параметров: одномерные и многомерные. Одномерные производят регулирование по одному параметру.
7.По виду структурной схемы: одноконтурные и многоконтурные. Одноконтурные имеют одну обратную связь, многоконтурные – несколько.
Обобщённая структурная схема АСР.
Обобщённая схема имеет два основных элемента: автоматический регулятор и объект регулирования. Схема предусматривает несколько корректирующих обратных связей; в зависимости от воздействия внешних возмущений корректирующих связей может быть до 100 и более, поэтому схема значительно усложняется, т.е. требует большого количества датчиков, сравнивающих, преобразующих и усилительных устройств.
Существуют 2 основных принципа регулирования: по отклонению и по возмущению.
В регулировании по отклонению производятся измерения выходной величины, подлежащей регулированию, в дальнейшем сравнением её с эталонной величиной, в результате чего вырабатывается регулирующее воздействие, применяющееся для изменения выходной величины.
Регулирование по возмущению: по этому принципу измерение значения регулирование физической величины не производится, а измеряется внешнее возмущение, вызванное изменением (отклонением) выходного параметра от эталонного. По величине этого возмущения вырабатывается управляющее воздействие, которое устраняет отклонение выходного параметра от эталонного.
Принцип регулирования по возмущению.
На рис..2 показана АСР напряжения генератора. В этой схеме заранее считают, что основным возмущающим действием является изменение частоты вращения, поэтому «борьбу» ведут только с этим внешним воздействием. Для этого в цепь обмотки возбуждения ОВ генератора 2 (Г) включают реостат Р, сопротивление которого изменяется с помощью центробежного механизма автоматически в соответствии с изменением частоты вращения генератора. В результате напряжение U на зажимах генератора остаётся постоянным.
Работа: принцип показан для поддержания постоянного выходного напряжения генератора постоянного, переменного тока. При увеличении скорость вращения якоря увеличивается, что приводит к отклонению кулачков центробежного механизма, который сдвигает движок реостата в сторону увеличения его сопротивления.
Электрич. схема регулирования по возмущению.
Принцип регулирования по отклонению.
Пример автоматического поддержания постоянным
Генератор постоянного тока вырабатывает напряжение, которое подаётся на соленоид. При увеличении выходного напряжения им же запитывается катушка соленоида, при этом эл/маш., преодолевая сопротивление пружины, будет втягиваться в катушку, сдвигая движок реостата в сторону увеличения его сопротивления, при этом ток возбуждения уменьшится.
АВТОМАТИЧЕСКИЕ СИСТЕМЫ КОНТРОЛЯ, СИГНАЛИЗАЦИИ
Служат для автоматического контроля параметров производственного процесса, качества выпускаемой продукции, сигнализации о нарушениях его нормального течения.
1. В зависимости от функции воспроизведения АСК делятся на автоматические измерительные системы, системы автоматической сигнализации, системы сортировки и отработки.
2. В АИС воспроизводящее устройство регистрирует текущее значение параметра, а в системах сигнализации происходит оповещение об отклонениях текущего значения параметра от эталонного. При этом применяется световая, звуковая и др. сигнализация, например охранная, пожарная и др.
Системы сортировки и отбраковки осуществляют проверку качества и количества выпускаемой продукции.
Классификация и уровни автоматизированных систем
Автоматизированные системы сегодня все больше применяются в разнообразных сферах деятельности. Высокую актуальность приобретает возможность внедрения автоматизированных систем управления для малых и больших производств.

Общие понятия автоматизированной системы
Все функции автоматизированных систем направлены на достижения определенной цели посредством определенных действий и мероприятий. Основополагающая цель АС – наиболее эффективное использование возможностей и функций объекта управления.
Выделяют следующие цели:
Классификация автоматизированных систем
Основные выделяемые признаки, по которым осуществляется классификация автоматизированных систем:
- Сфера, в которой функционирует объект управления: строительство, промышленность, непромышленная сфера, сельское хозяйство.
- Вид рабочего процесса: организационный, экономический, промышленный.
- Уровень в системе государственного управления.
Категории автоматизированных систем
Классификация структур автоматизированных систем в промышленной сфере разделяется на такие категории:
Децентрализованная структура. Система с данной структурой применяется для автоматизации независимых объектов управления и является наиболее эффективной для этих целей. В системе имеется комплекс независимых друг от друга систем с индивидуальным набором алгоритмов и информации. Каждое выполняемое действие осуществляется исключительно для своего объекта управления.
Централизованная структура. Реализует все необходимые процессы управления в единой системе, осуществляющей сбор и структурирование информации об объектах управления. На основании полученной информации, система делает выводы и принимает соответствующее решение, которое направлено на достижение первоначальной цели.
Централизованная рассредоточенная структура. Структура функционирует по принципам централизованного способа управления. На каждый объект управления вырабатываются управляющие воздействия на основании данных обо всех объектах. Некоторые устройства могут быть общими для каналов.
Алгоритм управления основывается на комплексе общих алгоритмов управления, реализующиеся с помощью набора связанных объектов управления. При работе каждый орган управления принимает и обрабатывает данные, а также передает управляющие сигналы на объекты. Достоинством структуры является не столь строгие требования относительно производительности центров обработки и управления, не причиняя ущерба процессу управления.
Иерархическая структура. В связи с возрастанием количества поставленных задач в управлении сложными системами значительно усложняются и отрабатывающиеся алгоритмы. В результате чего появляется необходимость создания иерархической структуры. Подобное формирование значительно уменьшает трудности по управлению каждым объектом, однако, требуется согласовать принимаемые ими решения.
Типы автоматизированных систем
- АСУП – системы управления предприятием.
- АСУТП – системы управления технологическими процессами.
- АСУПП – системы подготовки производства.
- ОАСУ – отраслевые системы управления.
- организационно-административные.
- АСК – системы контроля качества продукции.
- ГПС– гибкие производственные системы.
- ЧПУ – системы управления станками с числовым программным обеспечением.
- группы систем или интегрированные системы.
Автоматизированные информационные системы
Автоматизированная информационная система – это комплекс аппаратных и программных средств, необходимых для реализации функций хранения данных и управления ими, а также для вычислительных операций.
Главная цель АИС – это хранение данных, обеспечение качественного поиска и передачи данных в зависимости от запросов для наибольшего соответствия запросов пользователей.
Выделяют наиболее важные принципы автоматизации процессов:
- надежность;
- окупаемость;
- гибкость;
- безопасность;
- соответствие стандартам;
- дружественность.
Классификация автоматизированных информационных систем имеет следующую структуру:
- Система, охватывающая один процесс в организации.
- Осуществляется несколько процессов с организации.
- Нормальная работа одного процесса сразу в нескольких взаимосвязанных организациях.
- Система, организующая функционирование нескольких процессов в нескольких взаимосвязанных системах.
Классификация по степени автоматизации
Информационные системы классифицируются также по степени автоматизации проводимых операций:
- ручные;
- автоматизированные;
- автоматические.
Ручные – в них отсутствуют современные средства для обработки информации, и все операции осуществляются человеком в ручном режиме.
Автоматические – абсолютно все операции по обработке информации осуществляются с применением технических средств без участия человека.
Автоматизированные информационные системы производят операции как с помощью технических средств, так и с помощью человека, однако, основная роль передается компьютеру. ИС классифицируются по степени автоматизации, а также по сфере применения и характеру деятельности.
Уровни автоматизированных систем
Выделяют три уровня автоматизированных систем управления:
Нижний уровень. Оборудование. На этом уровне внимание отводится датчикам, измерительным и исполнительным устройствам. Здесь производится согласование сигналов с входами устройств и команд с исполнительными устройствами.
Средний уровень. Уровень контроллеров. Контроллеры получают данные с измерительного оборудования, а после передает сигналы для команд управления, в зависимости от запрограммированного алгоритма.
Верхний уровень – промышленных серверов и диспетчерских станций. Здесь осуществляется контроль производства. Для этого обеспечивается связь с низшими уровнями, сбор информации и мониторинг протекания технологического процесса. Этот уровень взаимодействует с человеком. Человек здесь производит контроль оборудования с помощью человеко-машинного интерфейса: графические панели, мониторы. Контроль за системой машин обеспечивает SCADA система, которая устанавливается на диспетчерские компьютеры. Данная программа собирает информацию, архивирует ее и визуализирует. Программа самостоятельно сравнивает полученные данные с заданными показателями, а в случае несоответствия проводит оповещение человека-оператора об ошибке. Программа производит запись всех операций, в том числе и действия оператора, которые необходимы в случае нештатной ситуации. Так обеспечивается контроль ответственности оператора.
Существуют также критичные автоматизированные системы. Это системы, которые реализуют различные информационные процессы в критичных системах управления. Критичность представляет собой вероятную опасность нарушения их стабильности, а отказ системы чреват значительными экономическими, политическими или другими ущербами.
Что же относится к критичным автоматизированным процессам? К критичным относят следующие системы управления: опасными производствами, объектами атомной отрасли, управления космическими полетами, железнодорожным движением, воздушным движением, управление в военных и политических сферах. Почему они критичны? Потому что решаемые ими задачи имеют критичный характер: использование информации с ограниченным доступом, использование биологических и электронных средств обработки информации, сложность технологических процессов. Следовательно, информационные автоматизированные системы становятся элементом критичных систем управления и в результате этого, получили принадлежность к этому классу.
Выводы
Подводя итоги, можно отметить важность автоматизации систем управления в различных сферах. На сегодняшний день внедрение подобных систем обеспечивает более качественное управление производством, сводя к минимуму участие человека в этих процессах и исключая тем самым, ошибки, связанные с человеческим фактором. Развитие и разработка автоматизированных систем управления дает возможность улучшать многие сферы: производство, экономику, энергетику, транспортную сферу и другие.

